KAIST 초청 강연···자동차, 항공기 분야 등 활용 가능

"막스플랑크 연구소장직을 그만두고 이제 저는 7개 연구그룹을 이끌며 중력과 관성을 모두 적용한 원격 시뮬레이터를 만드는 것을 목표로 하고 있습니다."
KAIST(한국과학기술원·총장 강성모)는 12일 하인리히 뷜도프(Henrich. H . Bulthoff) 막스플랑크 연구소 Biological Cybernetics 전 소장을 초청, KAIST 학생 50여명이 참석한 가운데 독일의 연구현장에 대해 듣는 자리를 마련했다.
인지 과학 분야 전문가인 뷜도프 전 소장은 막스플랑크 연구소에서 7개 연구 그룹을 이끌고 있다. 그는 ▲지각과 목록화 ▲동작기반 시뮬레이션 ▲로봇과 인간기계시스템 ▲가상 현실에서의 인식과 행동 등의 과제를 수행 중에 있다.
이날 강연에서 그는 현재 진행하고 있는 연구에 대해 소개했다. 그에 의하면 우리의 뇌는 시각적으로 외부 환경 정보를 받아들이지만 우리가 보는 정보가 객관적인지에 대한 의문을 먼저 갖는다. 따라서 어떻게 뇌가 행동하는지에 대한 알고리즘 분석이 먼저 요구된다.
그는 "인간의 지각과 인식, 행동을 분석할 수 있는데 언제 인식에 실패하는지에 대한 연구가 필요하다. 하지만 인간의 시야에 따라 받아들이는 것이 다르다"면서 "자체운동인식에 대해 먼저 파악하는 것이 중요하다. 시야(vision)는 인식에 있어서 중요한 단서다"고 말했다.
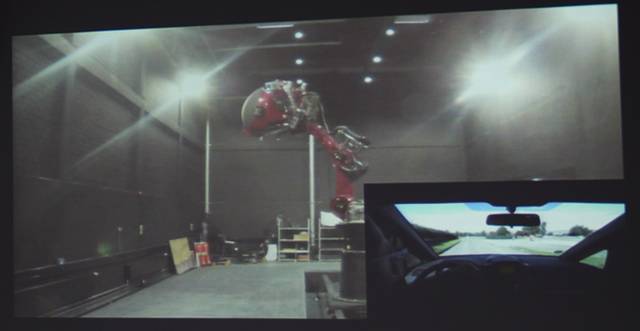
동작기반인식에 대한 연구는 1875년부터 시작됐다. 내부 변형, 동작 등에 관한 연구가 추진되어 왔다. 비행 시뮬레이터 등의 사이버네틱스 동작 인식도 그 일환이다. 그는 사이버네틱스 연구소가 특별히 제작한 로봇 팔 시뮬레이터를 소개했다.
시뮬레이터에서 로봇 팔은 관성, 중력변화, 균형 등에 대한 다양한 연구 수행이 가능하다. 이를 위해서는 균형과 비대칭에 대해서는 복합감각이 필요하다. 어떻게 인간이 각기 다른 경로로 상황을 인지하는지에 대해 연구하며 한계점을 변화시킨다는 것이 그의 설명이다.
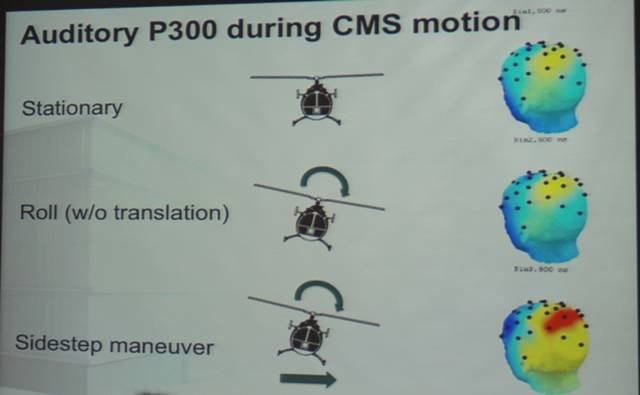
일반적으로 민감성은 다양하고 비선형이다. 회전이나 흔들림과 같은 복합성에 대해 시각적, 관성적 접근이 필요하다. 또 다감각의 자가 동작 인식도 요구된다.
그는 "기울임 등의 물리적 변형과 선형가속 등 인지 기반 동작 인식을 연구하고 있다"면서 "모션인식모형을 통해 시뮬레이터 동작을 변형 시킨다. 자동차, 헬리콥터 등에 활용해 실험평가를 하고 데이터 수집과 실험 확인을 하고 있다"고 설명했다.
그의 목표는 원격동작환경 조성과 제어국(Control Station)을 설립하는 것이다. 단순한 시각적 정보만을 주는 것이 아니라, 관성에 대한 정보를 주고 원격조정하는 것을 의미한다. 막스플랑크의 연구는 중력과 관성까지 모두 적용시켜 연구하는 것이다.
또 현재 초공간(Hyperspce)에서의 가상현실 시뮬레이션도 준비중에 있다. 그는 1인 항공시스템(personal aerial transportation system)이 도래할 것이라 전망했다. 항공시스템이 자동화 되고 인간과 비행기가 상호 작용할 수 있는 체계를 의미한다.
증강현실 시뮬레이터의 활용 분야는 무궁무진하다. 그는 "최고의 자동차 시운전은 직접 탑승하는 것이다"라면서 "페라리 운전자도 시뮬레이션을 이용해 가속도 등을 최적화해서 설계됐다"라고 설명했다.
한편, 뷜도프 소장은 EU의 도시교통난 해결 프로젝트의 일환인 '마이콥터 프로젝트'를 수행중이며, 고려대 명예교수로 한국 학생들을 지도한 경험이 있다.

댓글 정렬